Summary of Complex Methods for Power Battery SOC Estimation
The state of charge (SOC) is defined as the ratio of the remaining capacity to the battery capacity. It is used to characterize the remaining energy of the power battery and is an important parameter reflecting the state of the power battery [1]. Accurate online estimation is the key to improving the cruising range of electric vehicles.
Since the SOC is affected by factors such as temperature, self-discharge, and active material of the plates, it is difficult to directly obtain the value of the SOC by measuring certain parameters. The continuous research and improvement of the complex methods that are different from the traditional methods is of great significance for accurately estimating the SOC of the power battery.
1 SOC estimation influencing factors analysis
There are many factors affecting the estimation of power battery SOC, including the following aspects:
(1) The working state of the power battery is complicated, and the time for turning on or off the power battery is random, which causes certain difficulties for the estimation work.
(2) The process of estimating the SOC of the power battery should be in the actual operation of the electric vehicle. Therefore, it is required to estimate in real time online, instead of taking the battery offline measurement separately; at the same time, the estimated result should have better convergence and robustness. Even if there is a certain error, it can still converge to the expected value after being processed and adjusted by the estimation method. [1].
Complex factors such as current surge, ambient temperature, self-discharge and aging of electric vehicles add many difficulties to the estimation work.
2SOC estimation complex method
In the early stage of research in this field, the commonly used methods are open circuit voltage method, ampere-time integration method, discharge experiment method, etc., but these methods are difficult to apply to actual online estimation, and have certain limitations. In recent years, researchers at home and abroad have continuously improved and innovated the estimation methods, and proposed many complicated methods to estimate the SOC of the power battery more accurately.
2.1 Kalman filter
The Kalman filter is an optimized autoregressive data processing algorithm that processes linear systems that are linear and subject to Gaussian distribution. Since the power battery SOC estimation model is nonlinear, it needs to be processed by the extended Kalman filter. The method applied to the SOC estimation of the power battery is to regard the power battery as a dynamic system, and the state of charge is an internal state of the system. The basic idea is to make an optimal estimate of the minimum variance in the system state [2].
The extended Kalman filter method requires high accuracy for the battery model. At present, the more commonly used battery classic models mainly include three types: Rint, Thevenin, and PNGV circuit models, as shown in Figure 1.
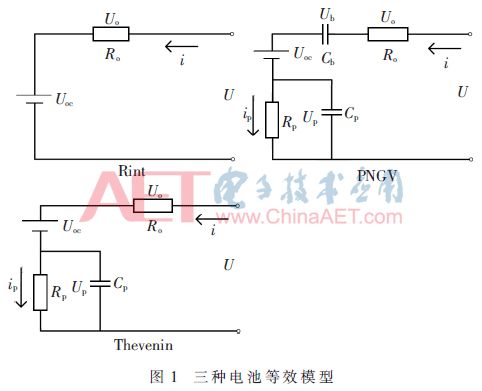
Among them, the Rint model is too idealized, and it is not suitable for practical estimation. The Thevenin model can better characterize the battery and is easy to calculate, and is easy to implement. The parameters of the PNGV model circuit are complicated and the calculation is inconvenient [3].
One of the characteristics of extended Kalman filtering is the use of the concept of state space to describe its mathematical model [4]. Mathematical modeling was performed based on the Thevenin battery equivalent model in Figure 1. The following equation can be obtained by the definition of Kirchhoff voltage, current law and SOC:
Among them, ω(k) is system white noise, and v(k) is observation noise, which is assumed to be Gaussian white noise in the design. The established state equations and observation equations are brought into the five core formulas of the extended Kalman filter algorithm, and the time update and observation update equations are established. Finally, the simulation system is established by MATLAB to estimate the power battery SOC.
The extended Kalman filter method is suitable for SOC estimation under severe current fluctuation conditions, overcomes the shortcomings of early research methods, and can control the SOC estimation error within a certain range, but the model accuracy and computing power requirements for the power battery Higher.
2.2 Neural Network Method
BP neural network is a multi-layer feedforward network trained by error inverse propagation algorithm. It is one of the most widely used neural network models, and it is robust, highly nonlinear and fault-tolerant [6].
The BP neural network consists of two parts: forward propagation and back propagation: forward propagation is the input signal passing from the input layer to the output layer through the hidden layer. If the output layer gets the desired output, the learning algorithm ends, otherwise it goes to the back propagation; the back propagation is the inverse calculation of the error (the difference between the sample output and the network output) according to the original connection path, and the layers are adjusted by the gradient descent method. The weights and thresholds of the nodes reduce the error [7].
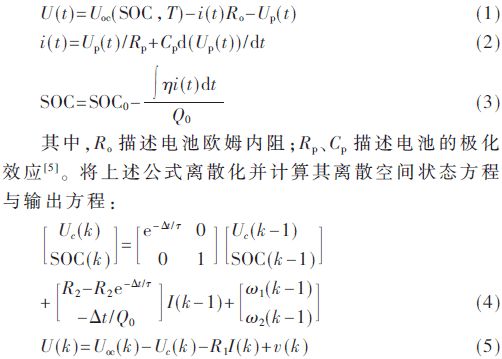
According to the characteristics of BP neural network, combined with multiple parameters of power battery, a BP neural network based SOC estimation model is established, as shown in Figure 2. Literature [8] uses a BP neural network-based intelligent scheme to establish a similar model and estimate the power battery SOC. At the same time, the genetic algorithm is used to optimize the neural network parameters to improve the accuracy of the estimation, and the feasibility of the method is verified by experiments.
Sampling the model is a prerequisite for estimating the SOC using the neural network method. Select a certain size of the power battery to fully discharge from full charge state to zero, take n sets of data for the SOC as a training sample for a fixed time period, and select m group data as the test sample after neural network training [9] .
Since the power battery SOC estimation is a complicated process, it is difficult to establish an accurate model. As a new intelligent algorithm, BP neural network method does not need to establish an accurate mathematical model. This method can analyze the relationship contained in the data through training and learning by simulating the human brain learning mechanism. However, this method requires a large amount of experimental data for training, and the more training data, the higher the accuracy of the estimation, and the longer it takes.
2.3 Support Vector Regression
Support Vector Machine (SVM) is a way to better realize the idea of ​​structural risk minimization. The method seeks the best compromise between the complexity of the system model and the accuracy of the approximation based on the given data information in order to obtain the best generalization ability [10].
According to different applications, it can be divided into support vector classification (SVC) and support vector regression (SVR). SVR is mainly used to solve small sample nonlinear problems, and has good applicability and robustness.
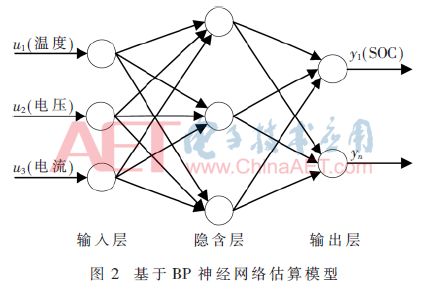
During the charging and discharging process of the power battery, relevant parameters of the power battery, such as battery current, voltage, temperature, etc., can be obtained by direct measurement. Using these parameters as input layer data and the power battery SOC as an output layer, an SVR model as shown in FIG. 3 is obtained.
Among them, the input layer functions to store voltage, current and other data, and does not perform any processing operations; the middle layer selects the appropriate kernel function K(x, xi) at the beginning of data training, and the commonly used kernel functions include polynomial functions. Radial basis (RBF) function and Sigmoid function [11]. Finally construct a regression estimation function:

The design idea of ​​the SVR method is to construct the regression estimation function by mapping the training data x1, x2, ..., xn, etc. to a high-dimensional feature space by a nonlinear function [12]. The method has better generalization and robustness, and iterative calculation speed is faster than neural network, but the estimation accuracy depends on the selection of SVR parameters (penalty coefficient and width coefficient). If the parameter combination is not optimal, the estimation accuracy is reduced. .
2.4 Composite algorithm
The above estimation method can control the SOC estimation result within a certain error range, but there are still some shortcomings. Based on the above methods, some improved composite algorithms, such as fuzzy Kalman filter algorithm and adaptive fuzzy neural network method, are proposed.
2.4.1 Fuzzy Kalman Filter
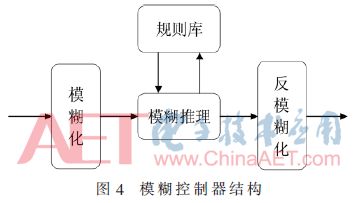
According to the analysis of the extended Kalman filter method, the system white noise and observation noise are assumed to be Gaussian white noise according to the discrete state space equation established by Thevenin model, and the measurement noise is constantly changing with the working conditions. The estimation results bring some error [13]. Therefore, the fuzzy controller is combined with the extended Kalman filtering method to monitor the difference between the actual variance of the noise and the theoretical variance in real time. Through the fuzzy inference process, the variance of the noise is continuously adjusted to improve the accuracy and robustness of the algorithm.
The basic structure of the fuzzy controller includes: fuzzy, knowledge base, fuzzy reasoning and anti-fuzzification. Its structure is shown in Figure 4. Among them, fuzzification is the process of converting the precise quantity of input into fuzzy quantity; the knowledge base includes database (quantization factor, scale factor, fuzzy value and membership function, etc.) and rule base (control rule of fuzzy language representation); fuzzy Reasoning is the process of obtaining fuzzy values ​​based on the current state of the rule base and the system; defuzzification is the process of converting fuzzy values ​​into precise quantities [14].
In [15], a simple fuzzy Kalman filter method is proposed, which defines the relationship between the measured variances of two adjacent moments as R(k)=a(k)R(k-1); the actual variance will be The difference C from the theoretical variance is used as the input of the fuzzy controller; the adjustment factor a(k) is used as the output of the fuzzy controller, then the domain of the input and output variables and the appropriate membership function are determined to realize the fuzzy Kalman filter. process.
In [16], an improved fuzzy adaptive Kalman filtering method is designed to estimate the power battery SOC. By monitoring the change of residuals online, using the mean and variance of the residuals as the input of the fuzzy controller, the noise is observed and adjusted in real time, thereby improving the estimation accuracy. The simulation results show that the algorithm can effectively estimate the battery SOC, and the accuracy is higher than the traditional Kalman filter algorithm.
The fuzzy Kalman filter method, the basic design idea is to use the extended Kalman filter for operation, and then monitor and adjust in real time through the fuzzy controller to reduce the influence of noise in the extended Kalman filter method. To some extent, the estimation error of the traditional Kalman filter method is reduced, and the accuracy of SOC estimation is improved. But this method still relies on the accuracy of the power battery model.
2.4.2 Adaptive Fuzzy Neural Network Method
Through the analysis of the neural network method in Section 2.2, the neural network method does not need to establish an accurate power battery model, and can approximate any nonlinear function, but it requires a large amount of data for training and learning, and lacks heuristic summarization ability [17]. Therefore, in view of the shortcomings of neural networks, fuzzy reasoning and neural network are organically combined, namely adaptive fuzzy neural network (ANFIS) method.
ANFIS is a comprehensive fuzzy neural network adaptive inference system, which uses the Takagi-Sugeno inference calculation method. The system structure is shown in Figure 5.
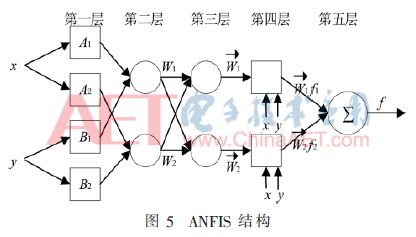
The first layer is the blur layer. The different parameters (voltage, current, temperature, resistance, etc.) of the power battery are blurred, and the output of each node is the value of the corresponding membership function; the second layer is the product layer, and the excitation intensity of each rule is calculated by multiplication; the third layer is The rule strength is normalized; the fourth layer is the rule output layer, and the fuzzy rule is continuously adjusted to be closer to the true value during training; the fifth layer is the anti-fuzzification process, and the fuzzy output result is converted to determine the final value. Results [18].
In [19], the accuracy of the SOC of the power battery is estimated by comparing the ANFIS method of two input and three input variables. The results show that both models can accurately estimate the SOC within the error tolerance, and the effect is better than the traditional estimation method. The ANFIS system with three input variables is more accurate, and the estimated maximum absolute error is within 1%.
The adaptive fuzzy neural network system combines the learning algorithm of neural network and the simple form of fuzzy reasoning. It not only has the advantages of training and learning ability, but also has the ability to summarize and reason the fuzzy system, which improves the accuracy of SOC estimation to some extent [20] ]. However, this method still requires more sample data for learning training.
3 Summary and outlook
The accurate estimation of the power battery SOC is a key technical link that prolongs the cruising range of the electric vehicle and gives the driver an accurate judgment signal. This paper analyzes the main reasons that affect the accurate estimation of SOC and discusses the complex methods of SOC estimation in recent years. The advantages and disadvantages of various methods are shown in Table 1.

At present, SOC estimation technology is still one of the difficulties in this field. Through the review of the complex methods of power battery SOC estimation, the basic working principle of the above methods is analyzed, and their advantages and disadvantages are compared. The limitations and development directions are pointed out.
The study of complex methods is an improvement of the early estimation method, which reduces the estimation error, but still has certain defects. In order to improve the accuracy of SOC estimation, it is necessary to establish a more accurate power battery model to better reflect the dynamic and static characteristics of the power battery. At the same time, a large number of experiments should be conducted to establish a relevant database to provide a stable and reliable source of sample data for the estimation method. In short, it is necessary to integrate various algorithms, learn from each other's strengths, propose more accurate and effective estimation methods, improve SOC estimation technology, and promote the development of the electric vehicle industry.
Solar Charge Controller ,Solar Controller,Solar Regulator,Solar Panel Controller
zhejiang ttn electric co.,ltd , https://www.ttnpower.com