A brief introduction to the on-board lidar in autonomous driving
Earlier we introduced the origin and historical development of lidar, and also briefly introduced the basic working principles of lidar. The laser radar transmitter emits a laser beam. After the laser beam encounters an object, it is diffusely reflected and returns to the laser receiver. The radar module multiplies the speed of light by the time interval of sending and receiving signals, and then divides by 2 to calculate The distance between the transmitter and the object.
This article first briefly introduces the classification of automotive lidar.
Lidar is classified into two categories according to the different installation positions. One type is installed around the unmanned vehicle, and the other type is installed on the roof of the unmanned vehicle. The laser radar installed around the unmanned vehicle generally has a laser beam less than 8, and the common ones are single-line laser radar and four-line laser radar. The laser radar installed on the roof of an unmanned vehicle generally has a laser beam not less than 16, and the common 16/32/64 line laser radar.
Single-line lidar is currently the lowest cost lidar. The low cost means the possibility of mass production.
The Foton self-driving car, which appeared when the first self-driving test site in Beijing was opened, uses four single-line lidars, which are arranged on the front, rear, left, and right of the unmanned vehicle to detect obstacles around the body, as shown in the following figure.

The principle of single-line lidar can be understood from the figure below. The single-beam laser transmitter rotates at a constant speed inside the lidar, and emits a laser every time it rotates a small angle. After patrolling a certain angle, a complete frame of data is generated. Therefore, the data of single-line lidar can be regarded as a row of dots at the same height.
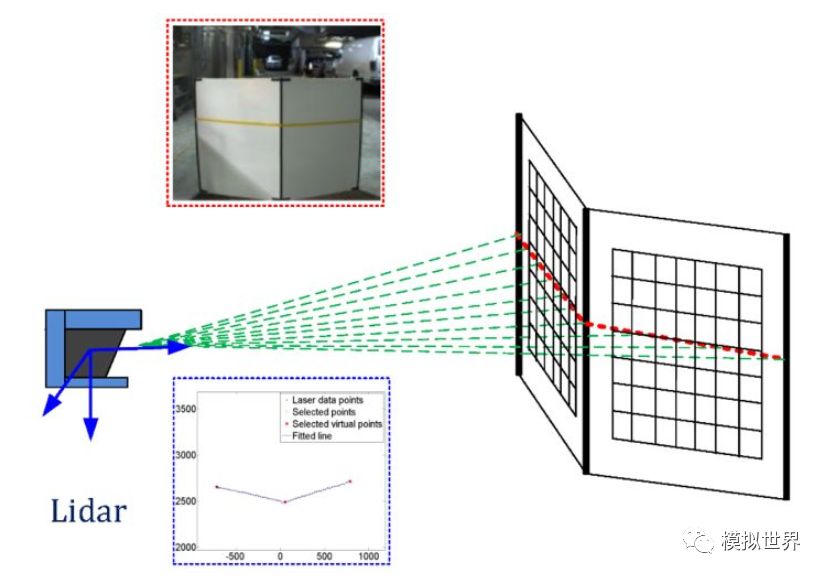
The single-line lidar data lacks a dimension and can only describe linear information, but cannot describe the surface. As shown in the figure above, it can be known that there is a piece of cardboard in front of the lidar and the distance between this piece of cardboard and the lidar, but the height information of this piece of cardboard is not known.
The four-line lidar is shown in the figure below, basically like this.

Typical applications, such as the brand-new Audi A8, in order to achieve Level 3 autonomous driving, the four-line lidar ScaLa is also arranged under the car's air intake grille.
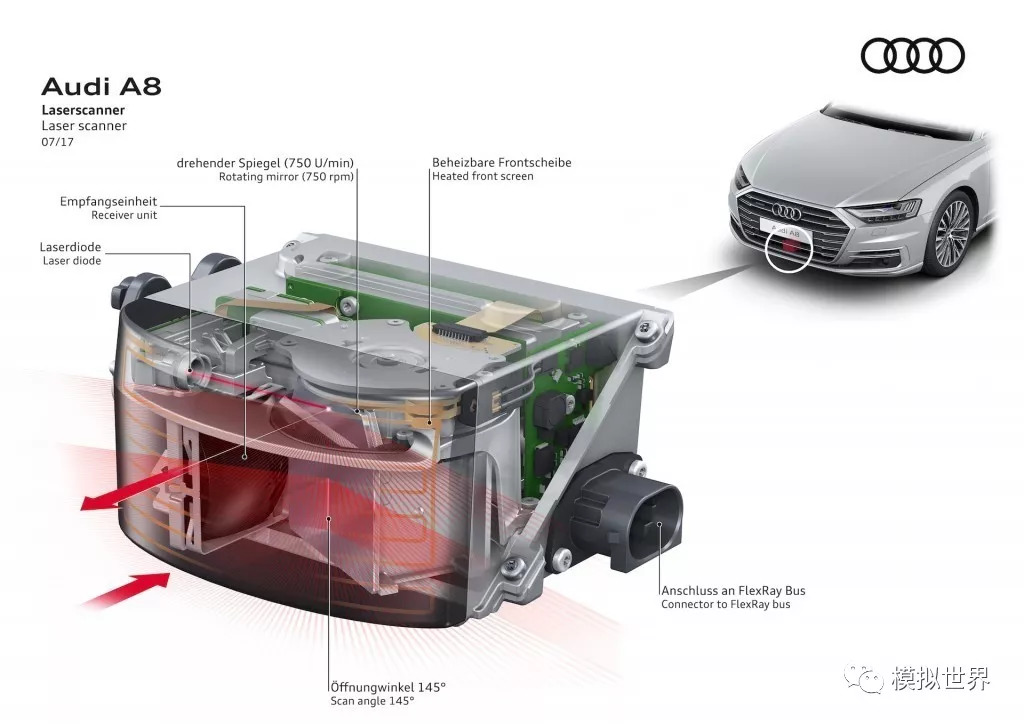
With the introduction of the principle of single-line lidar before, referring to the basic principle of single-line lidar, the working principle of four-line lidar is easy to understand. As shown in the figure below, different colors represent different laser transmitters.
The four-line lidar polls four laser transmitters, and after one polling cycle, one frame of laser point cloud data is obtained. Four points of cloud data can form plane information, so that the height information of obstacles can be obtained. The distance information of obstacles can be obtained according to the point cloud coordinates of a single frame. Then, the distance information is differentiated according to the coordinates of the multi-frame point cloud, and the speed information of the obstacle can be obtained.
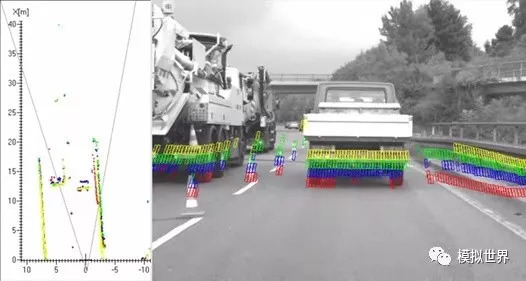
In practical applications, after purchasing lidar products, their suppliers will also provide supporting software development kits (SDK, Software Development Kit). These software development kits can easily allow users to obtain accurate point cloud data. It is convenient for the development of autonomous driving, and even directly outputs the results of the obstacles that have been processed.
As shown in the figure below, the green rectangular frame is the position of the obstacle relative to the vehicle, and the front end of the rectangular frame has a small triangle indicating the direction of movement of the obstacle.

The lidar installed around the unmanned vehicle is described above. For the lidar installed on the roof of the unmanned vehicle, the laser beam is generally not less than 16, and 16/32/64 line lidars are common.

The 16/32/64 line Lidar has a sensing range of 360°. In order to maximize their advantages, they are often installed on the top of unmanned vehicles. The technical parameters and costs of the three lidars are shown in the figure below.

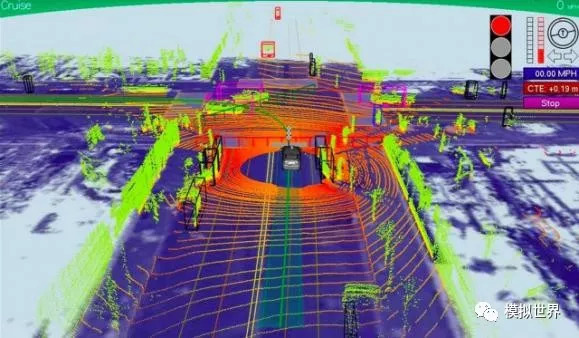
After the 360° laser data is visualized, it is the effect that everyone often sees on various promotional images, as shown in the figure below. Each circle in the figure is data generated by a laser beam. The more laser radar beams, the better the detection effect of objects. For example, the data generated by the 64-line lidar will make it easier to detect the curb on the side of the road.

The 16/32/64 line lidar can only provide the original point cloud signal, and there is no corresponding SDK to directly output the obstacle results. Therefore, major autonomous driving companies are researching algorithms on their own to complete the perception of unmanned vehicles on the basis of point cloud data.
The most important and most expensive device on Google Car is the HDL-64E 64-line laser transmitter produced by Velodyne Lidar. It can continuously emit 64 laser beams with a maximum range of 120 meters while rotating, and receive the reflected beams, and calculate the distance between the object and the car based on the difference in return time. So as to draw a real-time 3D topographic map around the car. And because the light beam is very dense and the refresh frequency is very fast, the shape, size and approximate motion trajectory of the object can be judged after the comprehensive detection data, which can be used as one of the judgment basis for the next action. The performance of HDL-64E is very powerful. It can provide 1.3 million sets of data to the Google Car processor per second, which can ensure that the information provided to the Google Car processor is almost real-time. Of course, this also puts forward higher requirements on the processor. The picture below is the world seen by Google Car under the operation of HDL-64E:
This is the appearance of the raw data that has not been processed by the processor. Google Car will integrate the collected data with the existing information of Google Maps built into the car body to determine a fairly accurate surrounding situation and make a decision for the system. The correct response lays a good foundation.
Pooling Pumps,Dc Water Pump,High Pressure Water Pump,Self-Circulation Water Pump
Sensen Group Co., Ltd.  , https://www.sunsunglobal.com